CS1674: Homework 7
Due: 11/7/2019, 11:59pm
This assignment is worth 50 points.
In this assignment, you will develop two variants of a scene categorization system. You will write three functions and two scripts. The first function will compute the spatial pyramid match representation. The second and third will find labels for your test images, using two classifiers: K nearest neighbors (KNN), and support vector machines (SVM). In the scripts, you will set up the dataset, which is divded into training and test sets for each category; then call your first function to compute the SPM representation, call your other functions to compute labels for the test data in different ways, and compare the performance of different levels of the SPM representation, and different classifiers. Please read the entire assignment before you start working.
Download the images and SIFT features from here: train, test. These files contains the training and test set, respectively; each contains eight folders, for eight categories. All images in a subfolder (e.g. "coast") belong to the same category. There are 100 samples in each "train" subfolder, and 50 in each "test" subfolder. For each sample, the dataset includes the image, a resized image (to be used in a later assignment) and a .mat file containing SIFT features for this image. You will load these features for use in the compare_features and compare_representations scripts described below.
You need to store both features and labels for each image in the training and test sets. You should save training/test labels in vector train_labels and test_labels of size Mx1 and Nx1, where M is the total number training images and N is the total number of test images. You should save your training/test features in cell arrays train_features and test_features of size Mx1 and Nx1, which contain the SIFT features for each image.
For each image, the corresponding .mat file contains two variables: f and d. Each column in the first variable matches a column in the second variable; both correspond to the same descriptor. You need the first two entries in each column of f to determine the (x, y) coordinates of the descriptor scored in that column of d.
First we describe the specific functions that the scripts rely on, that compute representations and predict labels. The dataset loading is done in the scripts described later.
Part I: Computing the SPM representation (10 points)
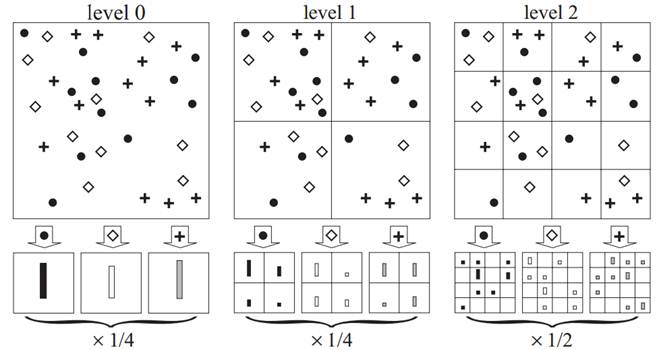
The Spatial Pyramid Match (SPM) representation was proposed in 2006 by Svetlana Lazebnik, Cordelia Schmid and Jean Ponce, and won the "test of time" award at CVPR 2016. The procedure of computing the pyramid is summarized in the following image from the paper, and described below.
Write the following: function [pyramid, level_0, level_1, level_2] = computeSPMRepr(sift, means); which computes the Spatial Pyramid Match histogram as described in class. The image size is the same for all images so this can be hard-coded inside your function.
Inputs:
- sift are the SIFT features for an image, and
- means are the cluster centers from the bag-of-visual-words clustering operation (computed on the training images, as described in Part III below).
Outputs:
- pyramid is a 1xd feature descriptor for the image combining the level-0, level-1, and optionally level-2 levels of the spatial pyramid match representation.
- level_0 is the standard bag-of-words histogram,
- level_1 is the bag-of-words histogram at level-1 (i.e. one histogram for each quadrant of the image), and
- level_2 is the level-2 bag-of-words histogram if you choose to complete the extra credit part of the assignment (see below), or set level_2 = []; otherwise.
Instructions:
- [2 pts] First, create a "bag of words" histogram representation of the features in the image, using the function function [bow] = computeBOWRepr(descriptors, means) that you wrote for HW4 (if your function does not work, please ask the TA or instructor for help). This will give you the representation shown in the left-hand side of the figure above, where the circles, diamonds and crosses denote different "words". In this toy example K = 3; in your submission, use K = 50. This forms your representation of the image, at level L = 0 of the pyramid.
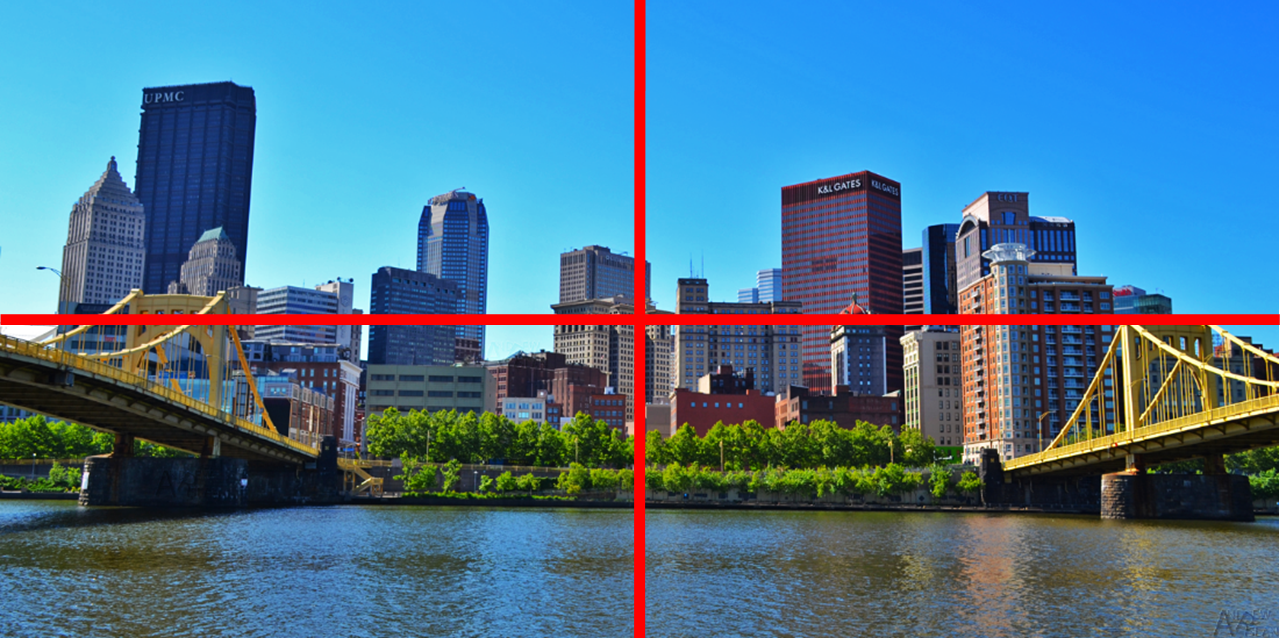
- [7 pts] Then, divide the image into four quadrants as shown below. You need to know the locations of the feature descriptors so that you know in which quadrant they fall; these are stored in the f variable in each SIFT file. Compute four BOW histograms, using the computeBOWRepr function, but generating a separate BOW representation for each quadrant. The concatenation of the four histograms is your level-1 representation of the image. The size of this representation is 1x(4*K).
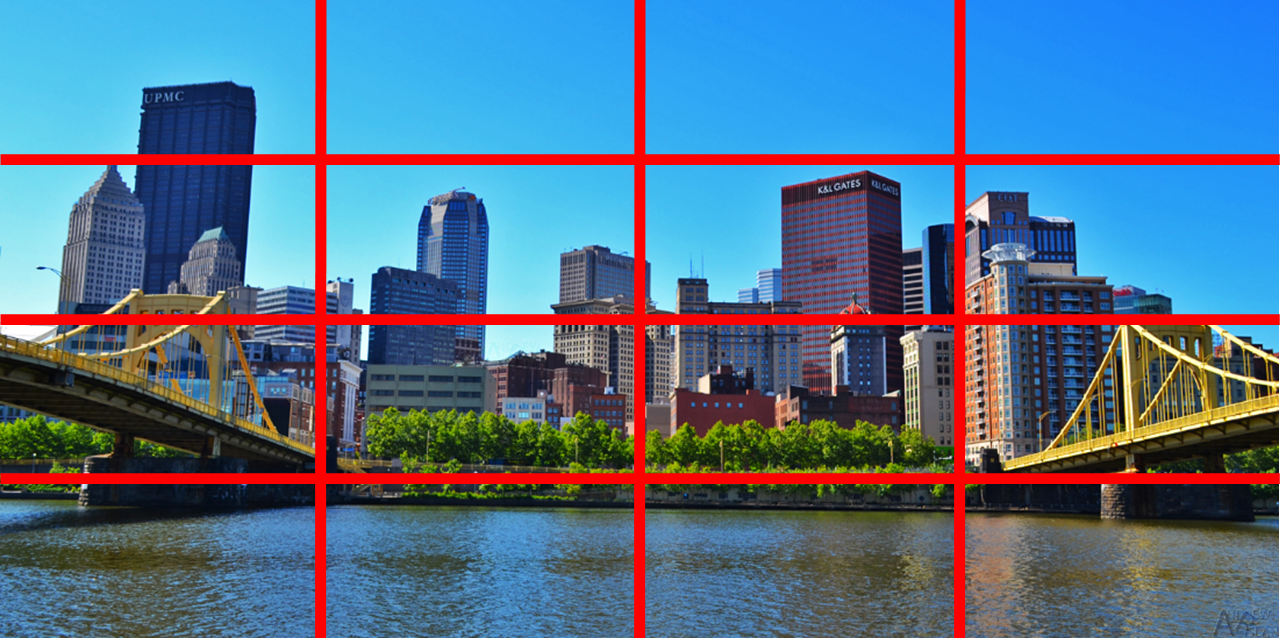
- [5 pts extra credit] In the original paper, there is one more subdivision into sixteen regions as shown below, and computation of one histogram for each cell in the grid. This is the level-2 representation of the image.
- [1 pt] Finally, concatenate the level-0, level-1, and level-2 representations computed in the above steps. This will give you the final image representation, and should be saved in the pyramid variable.
Part II: Training and obtaining labels from two classifiers (15 pts)
In this part, you will write functions to obtain labels on the test data from two classifiers, support vector machines (SVM) and K nearest neighbors (KNN). (We will cycle the training or test sets as the actual test set, for comparison purposes, in Part III below.) Note that the value of k in KNN is distinct from the value K in K-means; we'll use k to denote the former and K to denote the latter.
Write the following functions:
- [10 pts] function [predicted_labels_test] =
findLabelsKNN(pyramids_train, labels_train, pyramids_test, k); which predicts the labels of
the test images using the KNN classifier. For each test image, compute the Euclidean distance between its descriptor and each training image's descriptor (the descriptors are now the Spatial Pyramids). Then find its k closest neighbors among only training images; you can use the Matlab function pdist2. Find the mode (most common value; see Matlab's function mode) among the labels, and assign the test image to this label. In other words, the neighbors are "voting" on the label of the test image. You have to write your own code, and you are NOT allowed to use the built-in Matlab function for KNN!
Inputs:
- pyramids_train, pyramids_test should be an Mx1 cell
array and an Nx1 cell array, respectively, where M is
the size of the training image set and N is the size of your
test image set, and each pyramids{i}
is the 1xd Spatial Pyramid Match representation of the
corresponding training or test image.
- labels_train should be an Mx1 vector of
training labels.
Outputs:
- predicted_labels_test should be a Nx1 vector of predicted labels for the test images.
- [5 pts] function [predicted_labels_test] =
findLabelsSVM(pyramids_train, labels_train, pyramids_test); which predicts the labels of the test images using an SVM. This function should include training the SVM. The inputs and outputs are defined as above but now we will use an SVM to determine the outputs. Use the Matlab built-in SVM functions for training and test/prediction. To train a model, use model = fitcecoc(X, Y); where X (of size MxD) are your features, and Y (of size Mx1) are the labels you want to predict. To use the model you just learned, call label = predict(model, X_test); where X_test of size NxD are the descriptors for the scenes whose labels you want to predict.
Part III: Comparing approaches (25 pts)
In this part, you will compare the KNN and SVM classifiers using the SPM representation. You will also compare how the same classifier performs when it uses different levels of the SPM pyramid. Your classifiers will predict to which scene category each test image belongs.
- [10 pts] In a script compare_representations.m:
- [2 pts] Run K-means clustering on features from the training set only. If the clustering is taking a while, select a random sample of the training features, but ensure you use a representative set (i.e. choose features from all training classes and/or images). Save the result as a variable means of size KxD.
- [3 pts] Call your computeSPMRepr to compute the spatial pyramid match representation on top of the extracted SIFT features, for all train/test images, and store the resulting representations in appropriate variables.
- [5 pts] Use an SVM classifier. Compare the quality of three representations, pyramid, level_0 and level_1. In other words, compare the full SPM representation to its constituent parts, which are the level-0 histogram and the concatenations of four histograms in level-1 (and if you are doing the extra credit, level-2). Compute the accuracy at each level, by measuring what fraction of the images was assigned the correct label. In a file results1.txt, describe your findings, and give your explanation of the performance of the different representations.
- [15 pts] In a script compare_classifiers.m, do the following steps (you can interleave them as you wish, order does not have to be as shown). You can assume the previous script has been run first, so you don't have to recompute the SPM representations.
- [5 pts] Apply the SVM and KNN classifiers (i.e. call findLabelsSVM, findLabelsKNN) to predict labels on the test set, using the pyramid variable as the representation for each image. For KNN, use the following values of k=1:2:9. Each value of k gives a different KNN classifier.
- [2 pts] Compute the accuracy of each classifier on (1) the training set, and (2) the test set, by comparing its predictions with the "ground truth" labels.
- [5 pts] Plot the training and test accuracy of both types of classifiers, using the values of k on the x-axis, and accuracy on the y-axis. Since SVM does not depend on the value of k, plot its performance as a straight line. Save the result as results.png and submit it. Label your axes and show a legend. Useful functions: plot, xlabel, ylabel, legend.
- [3 pts] Finally, in a text file results2.txt, explain what you see in your plot, and explain the trends on the training and test sets you see as k increases.
Submission:
- computeSPMRepr.m
- findLabelsKNN.m
- findLabelsSVM.m
- compare_representations.m
- compare_classifiers.m
- results.png, results1.txt, results2.txt