Seeing Behind the Camera:
Identifying the Authorship of a Photograph
Abstract
We introduce the novel problem of identifying the photographer behind
the photograph. To explore the feasibility of current computer vision
techniques to address this problem, we created a new dataset of over
180,000 images taken by 41 well-known photographers. Using this dataset,
we examined the effectiveness of a variety of features (low and high-level,
including CNN features) at identifying the photographer. We also trained
a new deep convolutional neural network for this task. Our results show
that high-level features greatly outperform low-level features at this
task. We provide qualitative results using these learned models that
give insight into our method's ability to distinguish between photographers,
allow us to draw interesting conclusions about what specific photographers
shoot, and demonstrate two applications of our method.
Experimental Results
For every feature in the table below (except TOP which assigns the max
output of PhotographerNET as the photographer label) we train a one-vs-all
multiclass SVM using a linear kernel. We report the F-measure for each
of the features tested. We observe that the deep features significantly
outperform all low-level standard vision features. We also observe that
Pool5 is the best feature within both CaffeNet and Hybrid-CNN. Since
Pool5 roughly corresponds to parts of objects, we can conclude that
seeing the parts of objects, not the full objects, is most discriminative
for identifying photographers. This is intuitive because an artistic
photograph contains many objects, so some of them may not be fully visible.
For more details and other observations, see our paper.
| Low |
High |
|
|
Caffenet |
Hybrid-CNN |
PhotographerNET |
| Color |
GIST |
SURF-BOW |
Object Bank |
Pool5 |
FC6 |
FC7 |
FC8 |
Pool5 |
FC6 |
FC7 |
FC8 |
Pool5 |
FC6 |
FC7 |
FC8 |
TOP |
| 0.31 |
0.33 |
0.37 |
0.59 |
0.73 |
0.7 |
0.69 |
0.6 |
0.74 |
0.73 |
0.71 |
0.61 |
0.25 |
0.25 |
0.63 |
0.47 |
0.14 |
T-SNE Visualizations

Hybrid-CNN Pool5

PhotographerNET FC7
Our T-SNE embeddings project the high dimensional feature vectors from
each image into a low dimensional space. We then plot the embedded features
by representing them with their corresponding photographs. By embedding
features in this way, we are able to see how the features split the
image space and gain insight into what the features are using to perform
their classifications. In the examples shown here, we observe that H-Pool5
divides the image space in semantically meaningful ways. For example,
we see that photos containing people are grouped mainly at the top right,
while buildings and outdoor scenes are at the bottom. In contrast, PhotographerNET’s
P-FC7 divides the image space along the diagonal into black and white
vs. color regions. It is hard to identify semantic groups based on the
image’s content. More discussion of these visualizations can be found
in our paper. Larger results of these and other features are available
in our supplementary material.
New Photograph Generation

Delano Pastiche

Erwitt Pastiche

Highsmith
Pastiche


Delano Authentic Photographs

Erwitt
Authentic Photograph

Highsmith
Authentic Photograph

Hine Pastiche

Horydczak Pastiche
Rothstein
Pastiche

Hine Authentic Photograph

Horydczak Authentic Photographs

Rothstein
Authentic Photograph
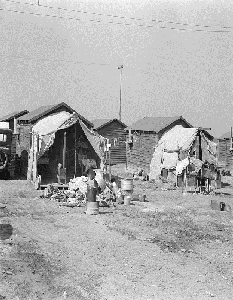
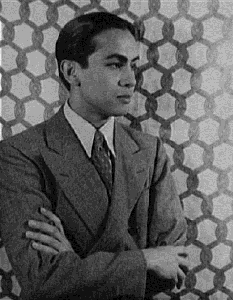
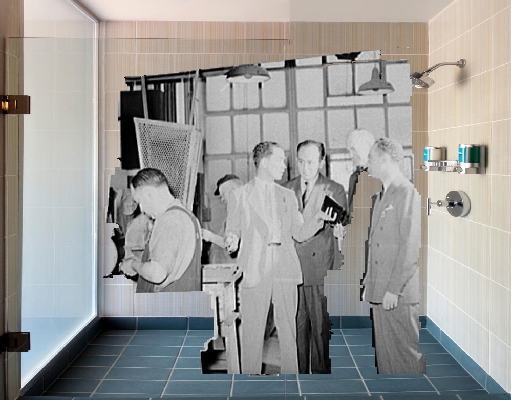
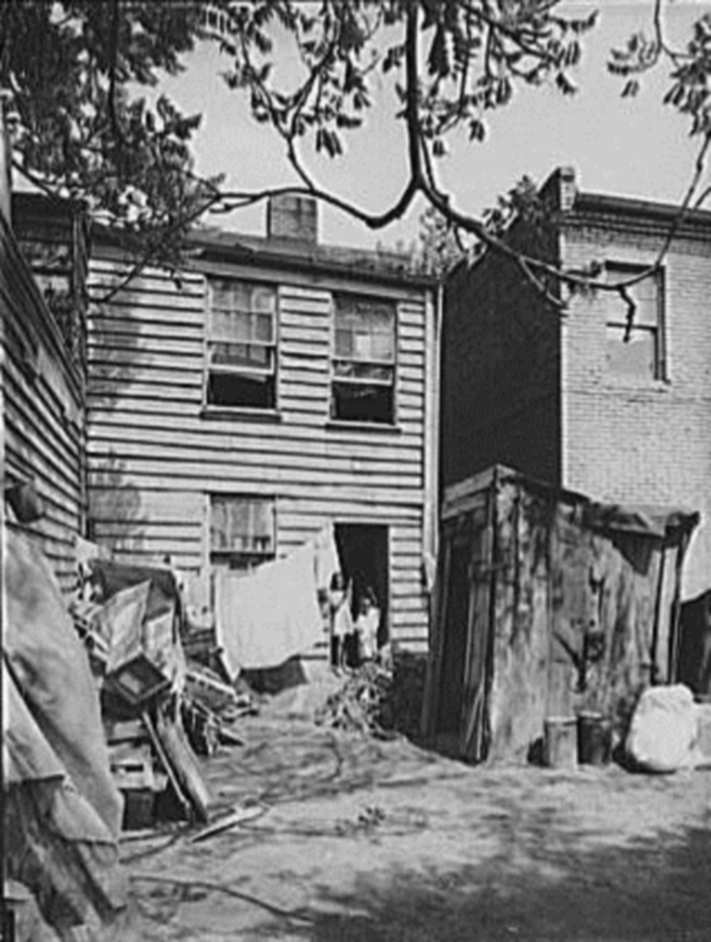
We wanted to see whether we could take our photographer models a step
further by actually generating new photographs imitating photographers’
styles. We first learned what types of scenes each photographer tended
to shoot. Then, in each scene type, we learned what objects the photographer
tended to shoot and where in the photograph they tended to be. Using
our learned probability models for each photographer, we probabilistically
sampled a scene type, the objects to appear in that scene, and the spatial
location of each object. We then used an object detector to find and
localize instances of those objects in the photographer's data, segmented
them out, and pasted them in the probabilistically chosen location.
We show several examples of generated photographs above from our paper
above. For each generated photograph, we also show at least one authentic
photograph. We note that many of the generated photographs bear similarity
with the real photographer's work. We provide many more generation results
in our supplementary material.